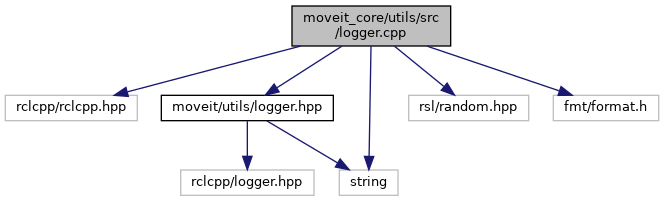
#include <rclcpp/rclcpp.hpp>#include <moveit/utils/logger.hpp>#include <string>#include <rsl/random.hpp>#include <fmt/format.h>
Include dependency graph for logger.cpp:
Go to the source code of this file.
Namespaces | |
| moveit | |
| Main namespace for MoveIt. | |
Functions | |
| rclcpp::Logger & | moveit::getGlobalRootLogger () |
| void | moveit::setNodeLoggerName (const std::string &name) |
| Call once after creating a node to initialize logging namespaces. More... | |
| rclcpp::Logger | moveit::getLogger (const std::string &name) |
| Creates a namespaced logger. More... | |