Lifts (i.e. Elevators)
地图要求
在正确集成电梯之前,请务必使用“traffic_editor”在导航图上绘制电梯位置以及正确的电梯名称和楼层。操作说明可在 Traffic Editor 一章中找到。
集成
电梯集成将允许 RMF 在多个楼层上工作,解决冲突并更大规模地管理共享资源。与门集成类似,基本要求是电梯控制器使用规定的协议接受命令,“OPC”就是这样一个例子。
电梯也将以与门类似的方式集成,依靠升降节点和升降适配器。以下框图显示了每个组件如何相互配合:
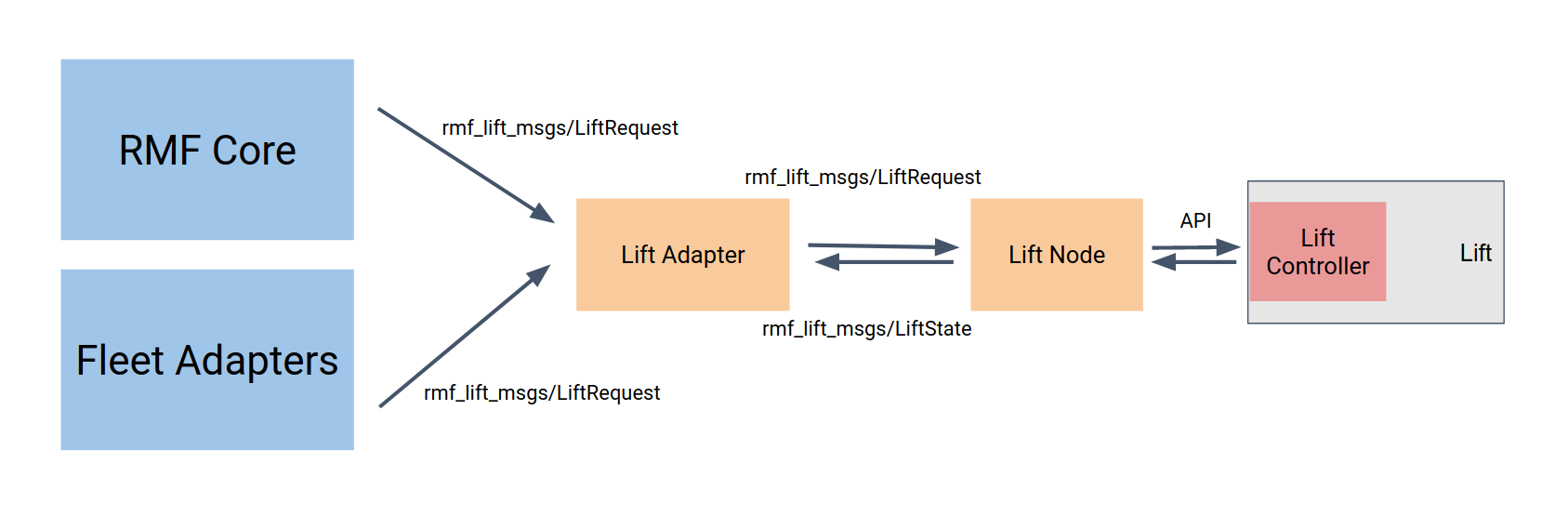
升降节点将充当驱动器,与升降控制器配合使用。升降节点的示例可在此 存储库 中找到。节点将使用下面列出的消息和主题通过 ROS 2 发布其状态并接收升降请求。
| Message Types | ROS2 Topic | Description |
|---|---|---|
rmf_lift_msgs/LiftState | /lift_states | State of the lift published by the lift node |
rmf_lift_msgs/LiftRequest | /lift_requests | Direct requests subscribed by the lift node and published by the lift adapter |
rmf_lift_msgs/LiftRequest | /adapter_lift_requests | Requests to be sent to the lift adapter/supervisor to request safe operation of lifts |
升降机适配器订阅“lift_states”,同时跟踪升降机的内部和期望状态,以防止其执行任何可能中断移动机器人或正常操作的操作。升降机适配器通过接收来自车队适配器和 RMF 核心系统的升降机请求并仅在适当的情况下将指令转发给升降机节点来执行此任务。任何直接发送到升降机节点而不经过升降机适配器的请求也将被升降机适配器否定,以防止对移动机器人车队操作造成不必要的干扰。