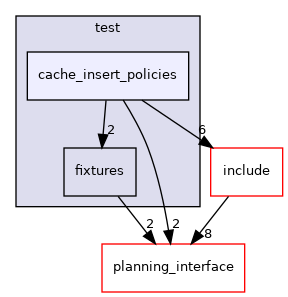
Directory dependency graph for cache_insert_policies:
Files | |
| file | test_always_insert_never_prune_policy_with_move_group.cpp [code] |
| file | test_best_seen_execution_time_policy_with_move_group.cpp [code] |
|
moveit2
The MoveIt Motion Planning Framework for ROS 2.
|
Files | |
| file | test_always_insert_never_prune_policy_with_move_group.cpp [code] |
| file | test_best_seen_execution_time_policy_with_move_group.cpp [code] |