moveit2
The MoveIt Motion Planning Framework for ROS 2.
moveit_ros
planning
planning_pipeline_interfaces
include
moveit
planning_pipeline_interfaces
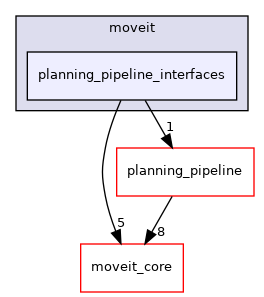
planning_pipeline_interfaces Directory Reference
Directory dependency graph for planning_pipeline_interfaces:
Files
file
plan_responses_container.h
[code]
file
plan_responses_container.hpp
[code]
file
planning_pipeline_interfaces.h
[code]
file
planning_pipeline_interfaces.hpp
[code]
file
solution_selection_functions.h
[code]
file
solution_selection_functions.hpp
[code]
file
stopping_criterion_functions.h
[code]
file
stopping_criterion_functions.hpp
[code]
Generated by
1.9.1